Installation de MicroPython
La première chose à faire consiste à installer une fois pour toute MicroPython sur notre carte.
C’est très simple et très rapide : https://www.raspberrypi.com/documentation/microcontrollers/micropython.html
Une autre façon consiste à le faire depuis Thonny : https://projects.raspberrypi.org/en/projects/introduction-to-the-pico/3
Configuration de Thonny
Dans le menu « Exécuter » de Thonny, il faut changer l’interpréteur.
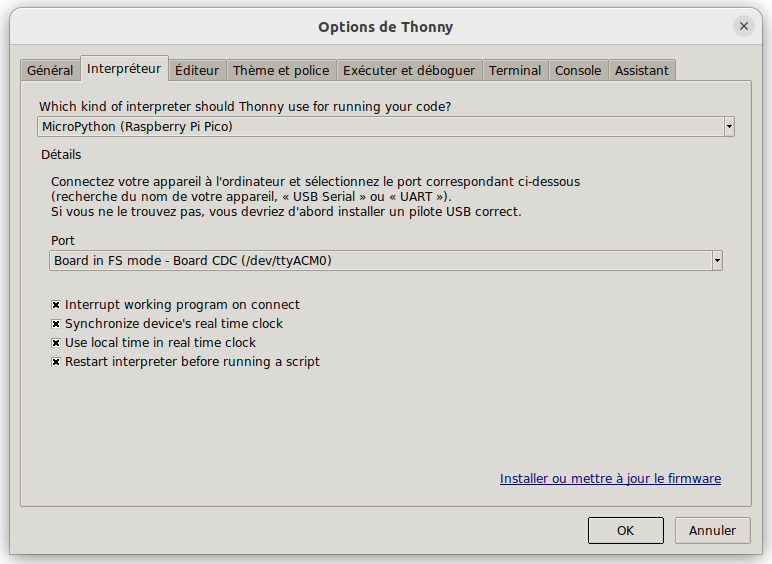
Une fois la carte branchée, Thonny pourra détecter le port utilisé pour la communication.
Installation de librairies
Si votre programme en a besoin, il faudra installer des librairies.
Commencez par installer « picozero » depuis Thonny : « Gérer les paquets ».
Les librairies seront installées dans un dossier « lib/ » de la carte.
Premier programme
Testons la communication en créant un premier programme faisant clignoter la led de la carte (pin25).
import machine
import time
led = machine.Pin(25, machine.Pin.OUT)
while True:
led.toggle()
time.sleep(2)
Au moment de sauvegarder, vous pouvez choisir entre l’ordinateur et la carte. Mettons-le sur la carte.
Il suffit depuis Thonny d’exécuter ce programme.
NB : le programme qui s’appelle « main.py » sera lancé automatiquement à la mise sous tension de la carte.