Le principe
Une fois la détection d’obstacle activée en utilisant l’icône Detect Obstacle, le robot envoie des signaux infrarouges depuis les led droite et gauche.
Si un des signaux est renvoyé par un obstacle, celui-ci sera détecté par la led réceptrice situé au centre de l’avant du robot.
Par un test avec la boucle if, on peut alors décider de l’action à exécuter (reculer, tourner, …).
Un exemple basique
Dans ce cas, le robot, ne cherche pas à savoir de quel côté se trouve l’objet. En cas de détection, le robot tourne sur lui-même, sinon, il avance.

Voici son lien.
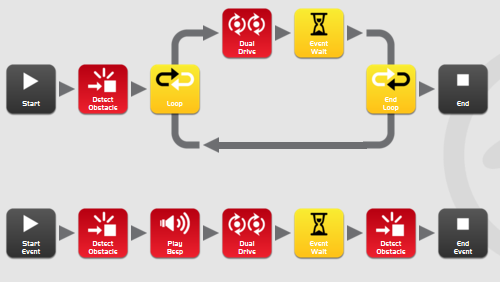
Un exemple plus complet
Dans cet exemple, on utilise deux événements pour agir en fonction de la détection d’un obstacle sur la droite ou sur la gauche.
Pendant le traitement de cet événement, on arrête la détection d’obstacle.

Voici son lien.