La commande Dual Drive
Cette commande, comme son nom l’indique, permet de gérer ensemble les deux moteurs. Elle suffit à tout type de déplacement
Voici toutes les directions possibles :
- Forward : avancer
- Backward : reculer
- Stop : arrêter
- Forward right : avancer vers la droite (le moteur gauche est arrêté)
- Forward left : avancer vers la gauche (le moteur droit est arrêté)
- Backward right : reculer vers la droite
- Backward left : reculer vers la gauche
- Spin right : tourner sur place vars la droite (les deux moteurs tourne dans des sens contraires)
- Spin left : tourner sur place vers la gauche (les deux moteurs tourne dans des sens contraires)
La commande Single Drive permet de contrôler un seul moteur à la fois. On peut l’utiliser lorsqu’on retire les roues et qu’on veut actionner un autre mécanisme.
Le principe d’utilisation
– On place une icône Dual Drive dans le programme.
– On choisit une direction et une vitesse.
– On place derrière l’icône ( Event Wait ). On choisit un temps d’attente.
– On place derrière une deuxième icône Dual Drive.
– On choisit comme sa nouvelle direction. Pour l’arrêter, ce sera Stop.
Un exemple
Ce programme va faire avancer le robot pendant 5 secondes.
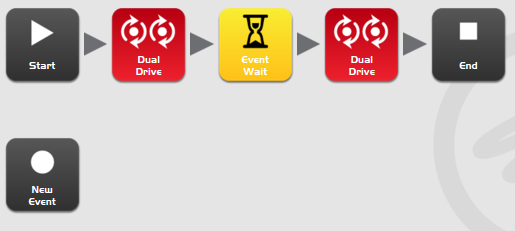
Voici le lien vers ce programme.
NB : dans cet exemple, la deuxiéme icône Dual Drive est inutile puisque le programme s’arrête ensuite. Mais de façon générale, il faut cet ensemble de trois icônes pour donner une commande de déplacement.