On peut mettre en place des projets dans lesquels on échange des messages par transmission infrarouge entre des robots.
À noter les que capteurs infrarouges d’émission et de réception sont situés sur l’avant du robot. Il faut donc penser à placer les robots de telle façon que l’échange de message puisse se faire.
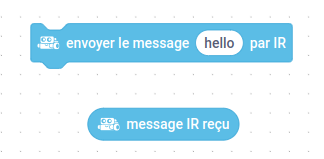
Quels blocs utiliser ?
Dans la catégorie « Détection », on utilise l’une des deux commandes suivantes :
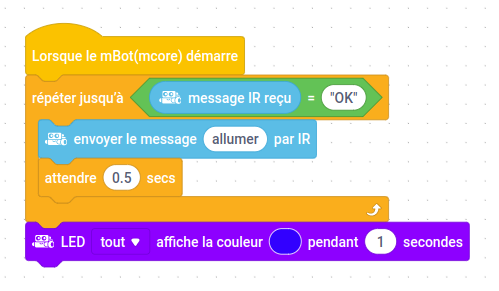
Exemples de programmes
Pour le premier robot :
Pour le second robot :
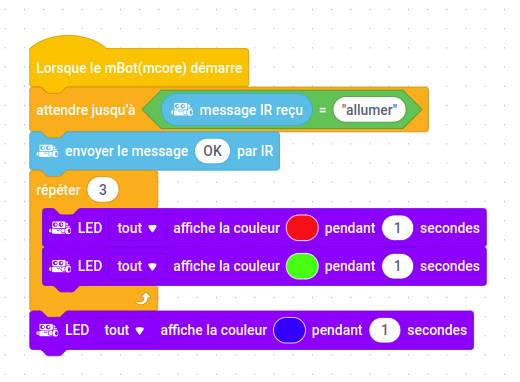
À noter que dans les tests, il faut mettre le nom du message entre guillemets.