Rotation
image := objet rotatedaround(centre,angle);
ou
image := rotation(objet,centre,angle);
Symétrie centrale
image := objet rotatedaround(centre,180);
ou
image := symetrie(objet,centre);
Symétrie axiale d’axe (AB)
image := objet reflectedabout(point_A,point_B);
ou
image := symetrie(objet,point_A,point_B);
Translation de vecteur \overrightarrow{AB}
image := objet shifted (point_B-point_A);
Exemples
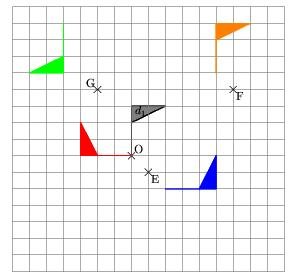
Voici une figure résumant les utilisations possibles. On y trouve des images du drapeau gris :
– par la rotation de centre O, de 90º dans le sens inverse des aiguilles d’une montre (figure rouge) ;
– par la symétrie de centre G (figure verte) ;
– par la symétrie d’axe (EF) (figure bleue) ;
– par la translation de vecteur \overrightarrow{EF} (figure orange).
Voici son code dans lequel on peut noter l’utilisation du type picture :
u:=1cm; figure (0,0,8u,8u); pair O,E,F,G; O=(3.5u,3.5u); E=(4u,3u); F=(6.5u,5.5u); G=(2.5u,5.5u); picture figd,figi; currentpicture:=nullpicture; path tri,piquet; tri:=(3.5u,5u)--(4.5u,5u)--(3.5u,4.5u)--cycle ; fill tri withcolor 0.5[black,white]; trace tri withpen pencircle scaled 1.5bp; piquet:=O--(3.5u,4.5u); trace piquet withpen pencircle scaled 1.5bp; figd:=currentpicture; trace grille(0.5) withcolor 0.5[black,white]; marque_p:="croix"; nomme.urt(O); nomme.lrt(E); nomme.lrt(F); nomme.ulft(G); label.rt(btex $d_1$ etex,(3.5u,4.85u)); figi := rotation(figd,O,90); %rotation %figi := figd rotatedaround(O,90); draw figi withcolor red; figi := symetrie(figd,G); %symetrie centrale %figi :=figd rotatedaround(G,180); draw figi withcolor green; figi := symetrie(figd,E,F); %symetrie axiale %figi := figd reflectedabout(E,F); draw figi withcolor blue; figi := figd shifted (F-E); %translation de vecteur EF draw figi withcolor orange; fin;